

著者: merakiki
翻訳:Deep Tide TechFlow
数十年にわたり、ロボット技術の応用範囲は非常に限定されており、主に構造化された工場環境で反復作業を実行することに集中していました。しかし、今日の人工知能(AI)はロボット分野を根本的に変革し、ロボットがユーザーの指示を理解し、動的に変化する環境に適応して実行できるようにしています。
私たちは急速に成長する新時代に突入しています。Citibankの予測によると、2035年までに世界で13億台のロボットが展開され、その応用範囲は工場から家庭やサービス業まで拡大します。同時にMorgan Stanleyは、人型ロボット市場だけでも2050年までに5兆ドル規模に達する可能性があると予測しています。
この拡大は巨大な市場ポテンシャルを解放する一方で、中央集権、信頼、プライバシー、スケーラビリティなどの重大な課題も伴います。Web3技術は、分散化、検証可能、プライバシー保護、協調的なロボットネットワークをサポートすることで、これらの問題に変革的なソリューションを提供します。
本記事では、進化し続けるAIロボットのバリューチェーンを深く掘り下げ、特に人型ロボット分野に焦点を当て、AIロボットとWeb3技術の融合がもたらす魅力的な機会を明らかにします。
AIロボットのバリューチェーン
AIロボットのバリューチェーンは、ハードウェア、インテリジェンス、データ、エージェントの4つの基本レイヤーで構成されています。各レイヤーは他のレイヤーの上に構築されており、ロボットが複雑な現実環境で知覚、推論、行動できるようにします。
近年、UnitreeやFigure AIなど業界の先駆者のリードにより、ハードウェアレイヤーは著しい進歩を遂げました。しかし、非ハードウェアレイヤーには依然として多くの重要な課題が残っています。特に、高品質なデータセットの不足、汎用的な基盤モデルの欠如、デバイス間の互換性の低さ、信頼性の高いエッジコンピューティングへの需要が挙げられます。したがって、現在最大の発展機会はインテリジェンスレイヤー、データレイヤー、エージェントレイヤーにあります。
1.1 ハードウェアレイヤー:「身体」
現代の「ロボットの身体」の製造と展開は、かつてないほど容易になっています。現在市場には100種類以上の異なるタイプの人型ロボットが存在し、TeslaのOptimus、UnitreeのG1、Agility RoboticsのDigit、FigureAIのFigure 02などが含まれます。
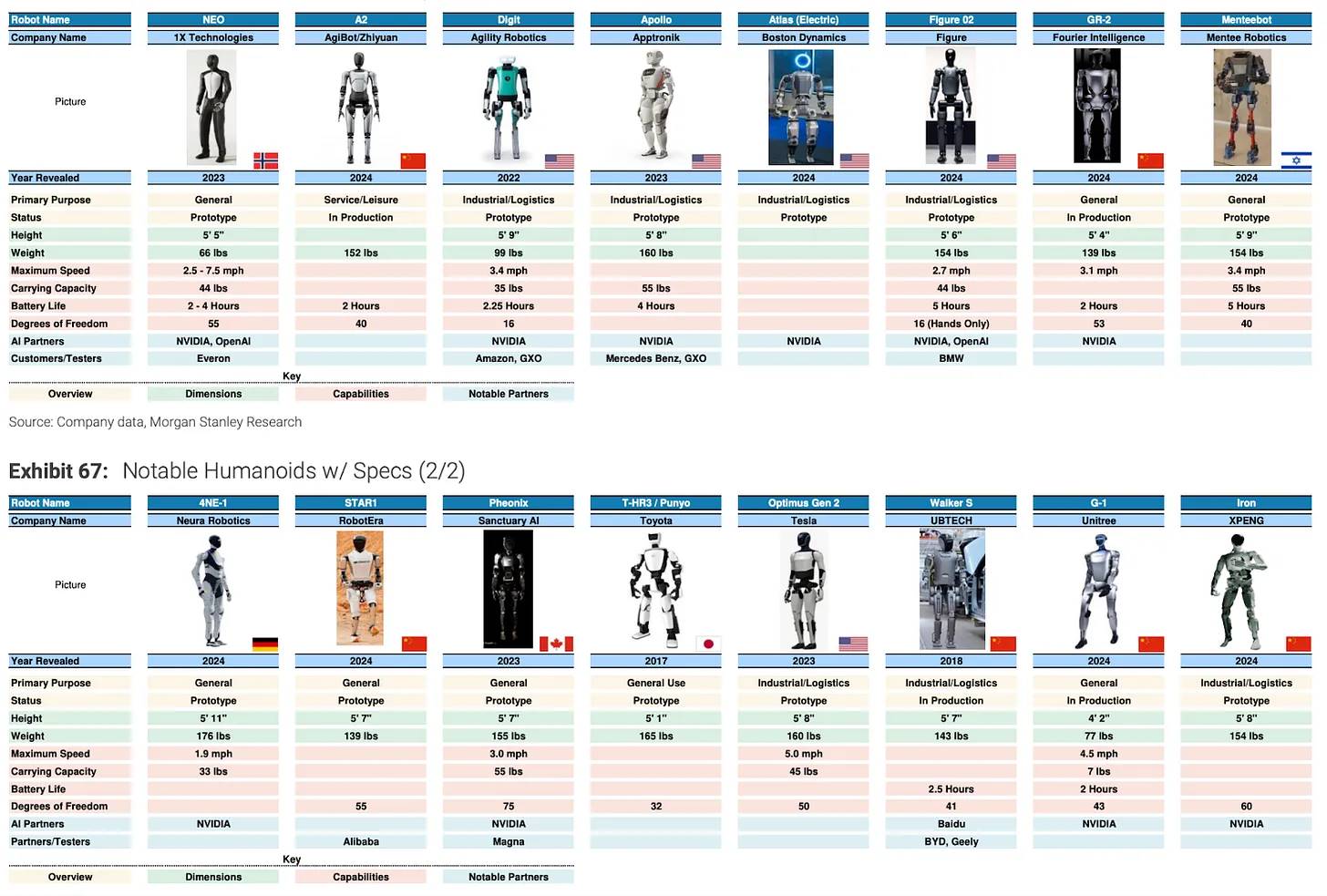
出典:Morgan Stanley「Humanoid Robots 100:Humanoid Robot Value Chain Map」
この進歩は、以下の3つの主要コンポーネントの技術的ブレークスルーによるものです:
-
アクチュエーター(Actuators):ロボットの「筋肉」として、アクチュエーターはデジタル指令を正確な動きに変換します。高性能モーターの革新により、ロボットは高速かつ精密な動作を実現できるようになり、誘電性エラストマーアクチュエーター(Dielectric Elastomer Actuators, DEAs)は繊細な作業に適しています。これらの技術はロボットの柔軟性を大幅に向上させ、TeslaのOptimus Gen 2は22の自由度(DoF)、UnitreeのG1も人間に近い柔軟性と印象的な移動能力を示しています。
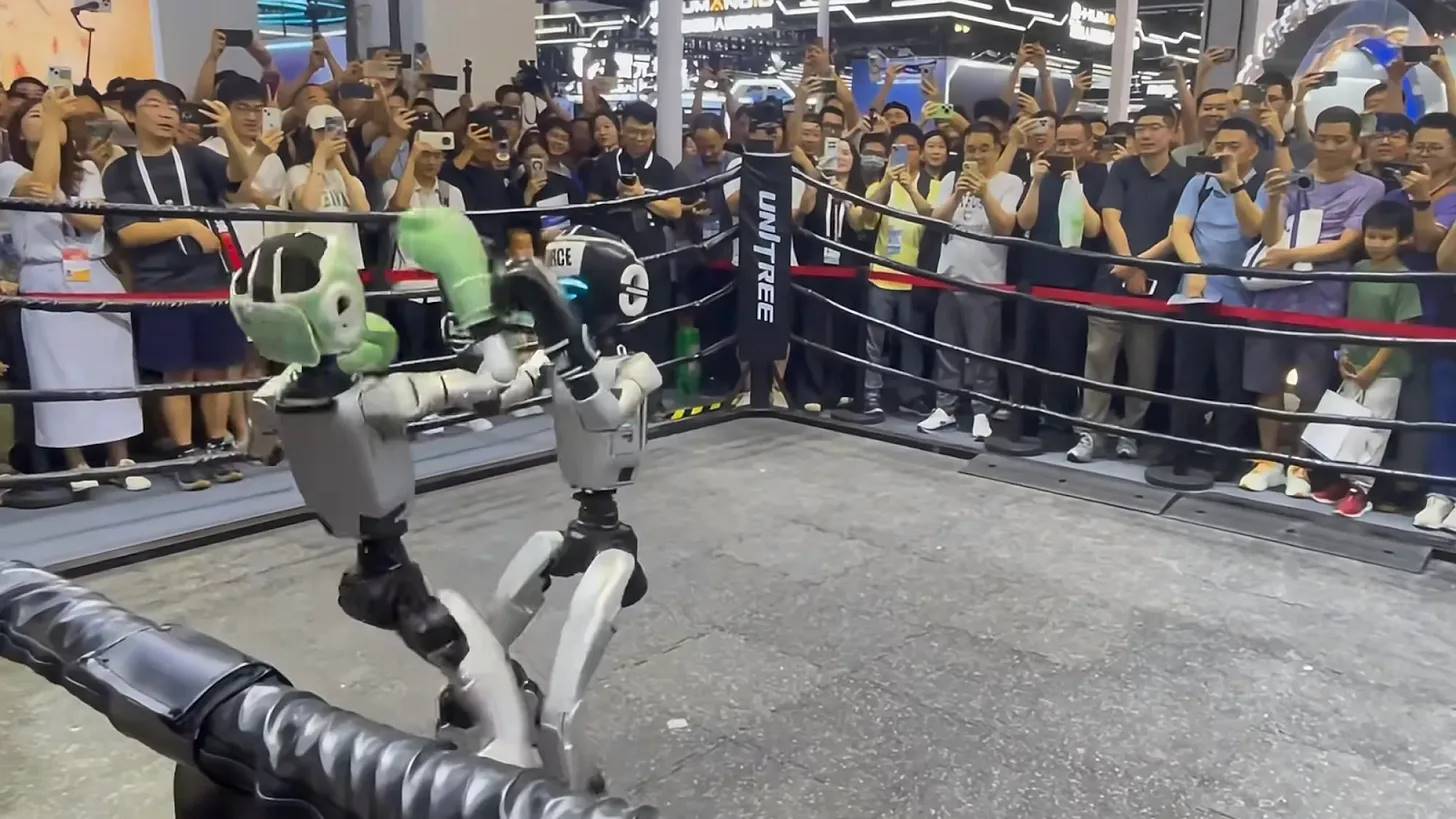
出典:Unitreeが2025年WAIC世界AI大会で最新の人型ロボットによるボクシング競技を披露
-
センサー(Sensors):先進的なセンサーは、視覚、LIDAR/RADAR、触覚、音声入力を通じてロボットが環境を知覚・解釈できるようにします。これらの技術は、ロボットの安全なナビゲーション、精密な操作、状況認識をサポートします。
-
組み込みコンピューティング(Embedded Computing):デバイス上のCPU、GPU、AIアクセラレーター(TPUやNPUなど)は、センサーデータをリアルタイムで処理し、AIモデルを実行して自律的な意思決定を可能にします。信頼性の高い低遅延接続がシームレスな協調を保証し、ハイブリッドなエッジ-クラウドアーキテクチャは、必要に応じてロボットが集中的な計算タスクをオフロードできるようにします。
1.2 インテリジェンスレイヤー:「脳」
ハードウェアが成熟するにつれ、業界の関心は「ロボットの脳」の構築、すなわち強力な基盤モデルと先進的な制御戦略に移っています。
AI統合以前、ロボットはルールベースの自動化に依存し、プログラムされた動作を実行するだけで適応的な知能を持っていませんでした。
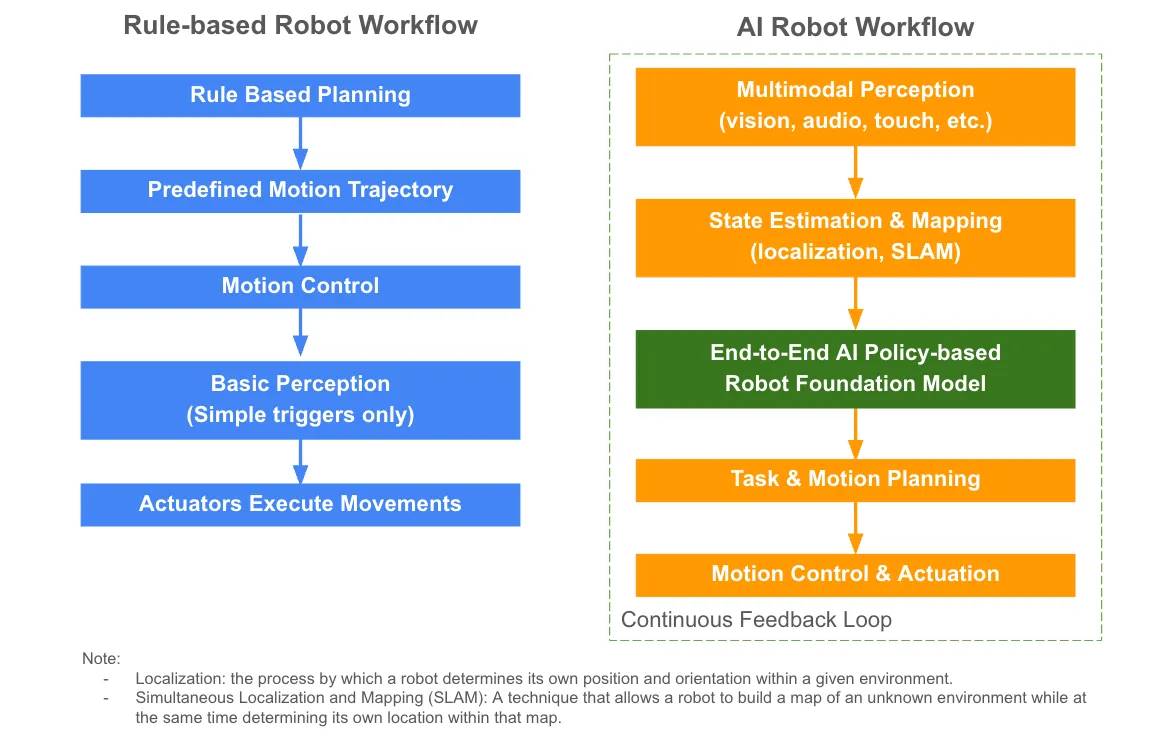
基盤モデルは徐々にロボット分野に応用されつつあります。しかし、汎用の大規模言語モデル(LLMs)だけでは不十分であり、ロボットは動的な物理環境で知覚、推論、行動する必要があります。これらのニーズを満たすため、業界はポリシーベースのエンドツーエンドロボット基盤モデルを開発しています。これらのモデルによりロボットは:
-
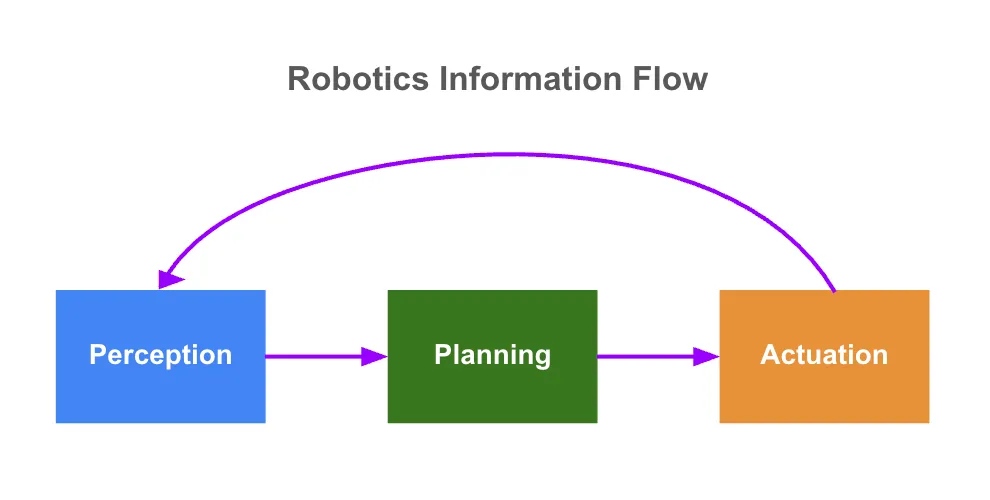
知覚(Perceive):マルチモーダルセンサーデータ(視覚、音声、触覚)を受信
-
計画(Plan):自身の状態を推定し、環境マップを作成し、複雑な指示を解釈、知覚を直接行動にマッピングし、人的エンジニアリングの介入を減少
-
行動(Act):運動計画を生成し、制御コマンドを出力してリアルタイム実行を実現
これらのモデルは世界とのインタラクションに関する汎用的な「ポリシー」を学習し、ロボットがさまざまなタスクに適応し、より高い知能と自律性で動作できるようにします。高度なモデルは継続的なフィードバックも利用し、ロボットが経験から学び、動的環境での適応能力をさらに強化します。
VLAモデルは感覚入力(主に視覚データと自然言語指示)をロボットの行動に直接マッピングし、ロボットが「見た」や「聞いた」内容に基づいて適切な制御コマンドを出せるようにします。注目すべき例としては、GoogleのRT-2、NVIDIAのIsaac GR00T N1、Physical Intelligenceのπ0などがあります。
これらのモデルを強化するため、通常は複数の補完的な手法が統合されます。例えば:
-
ワールドモデル(World Models):物理環境の内部シミュレーションを構築し、ロボットが複雑な行動を学び、結果を予測し、行動を計画するのに役立ちます。例えば、Googleが最近発表したGenie 3は、前例のない多様なインタラクション環境を生成できる汎用ワールドモデルです。
-
ディープ強化学習(Deep Reinforcement Learning):試行錯誤を通じてロボットが行動を学習します。
-
遠隔操作(Teleoperation):遠隔制御を可能にし、トレーニングデータを提供します。
-
デモンストレーション学習(LfD)/模倣学習(Imitation Learning):人間の動作を模倣することでロボットに新しいスキルを教えます。
下図は、これらの手法がロボット基盤モデルでどのように機能するかを示しています。
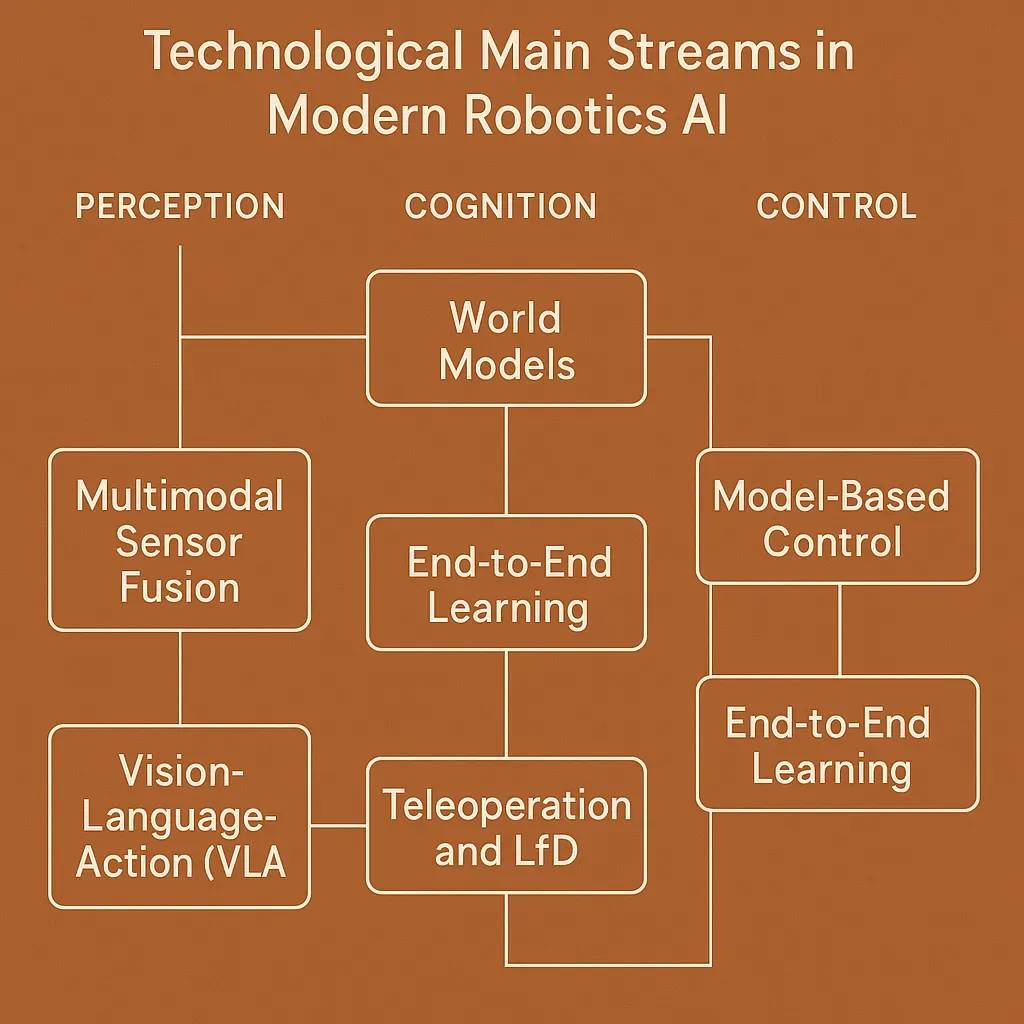
出典: ワールドモデル:AGIを推進する物理知能のコア(World models: the physical intelligence core driving us toward AGI)
最近のオープンソースのブレークスルー、例えばPhysical Intelligenceのπ0やNVIDIAのIsaac GR00T N1は、この分野の重要な進展を示しています。しかし、ほとんどのロボット基盤モデルは依然として中央集権的かつクローズドソースです。Covariant、Teslaなどの企業は依然として独自のコードやデータセットを保持しており、主な理由はオープンなインセンティブメカニズムの欠如です。
この透明性の欠如は、ロボットプラットフォーム間の協調や相互運用性を制限し、安全で透明なモデル共有、コミュニティガバナンスのオンチェーン標準、デバイス間の相互運用性レイヤーの必要性を浮き彫りにしています。このアプローチは信頼と協力を促進し、この分野のより強力な発展を推進します。
1.3 データレイヤー:脳の「知識」
強力なロボットデータセットは、量、質、多様性という3つの柱に依存しています。
業界はデータ蓄積に一定の努力をしてきましたが、既存のロボットデータセットの規模は依然として大きく不足しています。例えば、OpenAIのGPT-3は3000億トークンでトレーニングされていますが、最大のオープンソースロボットデータセットであるOpen X-Embodimentは、100万以上の実ロボット軌跡、22種類のロボットタイプしか含まれていません。これは、強力な汎化能力を実現するために必要なデータ規模と比べて大きなギャップがあります。
一部の独自手法、例えばTeslaがデータファクトリーを通じてデータを収集し、スタッフがモーションキャプチャスーツを着用してトレーニングデータを生成する方法は、より多くの実際の運動データを収集するのに役立ちます。しかし、これらの方法はコストが高く、データの多様性が限られ、拡張が困難です。
これらの課題に対応するため、ロボット分野では以下の3つの主要なデータソースが活用されています:
-
インターネットデータ:インターネットデータは規模が大きく拡張しやすいですが、主に観察データであり、センサーや運動信号が欠如しています。インターネットデータで大規模な視覚言語モデル(GPT-4VやGeminiなど)を事前学習することで、価値あるセマンティックおよび視覚的な先行知識を提供できます。また、動画に運動学ラベルを付与することで、元の動画を操作可能なトレーニングデータに変換できます。
-
合成データ:シミュレーションで生成された合成データは、大規模な実験や多様なシナリオを迅速にカバーできますが、現実世界の複雑さを完全に反映できず、これが「シミュレーションから現実へのギャップ」(sim-to-real gap)と呼ばれます。研究者はドメイン適応(データ拡張、ドメインランダム化、敵対的学習など)やシミュレーションから現実への転移を通じてこの問題を解決し、モデルを反復的に最適化し、現実環境でテスト・微調整します。
-
実世界データ:希少かつ高価ですが、実世界データはモデルの実装やシミュレーションと実際の展開のギャップを埋めるために不可欠です。高品質な実データには通常、第一人称視点(egocentric views)が含まれ、ロボットがタスク中に「見た」内容や運動データを記録します。運動データは通常、人間のデモンストレーションや遠隔操作を通じて収集され、VR、モーションキャプチャデバイス、触覚ティーチングなどを利用し、モデルが正確な実例から学習できるようにします。
研究によれば 、インターネットデータ、実世界データ、合成データを組み合わせてロボットをトレーニングすることで、いずれか一つのデータソースに依存するよりも、トレーニング効率とモデルのロバスト性(Deep Tide注:異常や危険な状況でもシステムが健全かつ強靭でいられる特性)を大幅に向上させることができます。
同時に、データ量の増加は役立ちますが、多様性の方がより重要です。特に新しいタスクやロボット形態への汎化を実現するためには、多様性が不可欠です。この多様性を実現するには、オープンなデータプラットフォームと協調的なデータ共有が必要であり、複数のロボット形態をサポートするクロスインスタンスデータセットの作成が、より強力な基盤モデルの発展を促進します。
1.4 エージェントレイヤー:「物理AIエージェント」
物理AIエージェントへの進化のトレンドが加速しており、これらの自律ロボットは現実世界で独立して行動できます。エージェントレイヤーの進歩は、モデルの微調整、継続的学習、および各ロボット固有の形態への実際の適応に依存します。
物理AIエージェントの発展を加速するいくつかの新たな機会は以下の通りです:
-
継続的学習と適応インフラ:リアルタイムのフィードバックループや展開中の経験共有を通じて、ロボットが継続的に改善できるようにします。
-
自律エージェント経済:ロボットが独立した経済主体として機能し、ロボット間市場で計算能力やセンサーデータなどのリソースを取引し、トークン化されたサービスで収益を生み出します。
-
マルチエージェントシステム:次世代のプラットフォームやアルゴリズムにより、ロボット群が協調・協力し、集団行動を最適化できるようになります。
AIロボットとWeb3の融合:巨大な市場ポテンシャルの解放
AIロボットが研究段階から現実世界での実展開へと進む中、長年存在してきた複数のボトルネックがイノベーションを妨げ、ロボットエコシステムのスケーラビリティ、ロバスト性、経済的実現可能性を制限しています。これらのボトルネックには、データとモデルの中央集権的孤島、信頼とトレーサビリティの欠如、プライバシーとコンプライアンスの制約、相互運用性の不足が含まれます。
2.1 AIロボットが直面する課題
-
中央集権的なデータとモデルの孤島
ロボットモデルには膨大かつ多様なデータセットが必要です。しかし、現在のデータとモデル開発は高度に中央集権化され、分散しており、コストも高いため、システムが分断され、適応性が低くなっています。動的な現実環境で展開されるロボットは、データの多様性不足とモデルのロバスト性の限界により、十分なパフォーマンスを発揮できません。
-
信頼、トレーサビリティ、信頼性
透明かつ監査可能な記録(データソース、モデルのトレーニングプロセス、ロボットの操作履歴など)の欠如は、信頼と責任感を損ないます。これはユーザー、規制当局、企業がロボットを採用する上での主要な障壁となっています。
-
プライバシー、安全性、コンプライアンス
医療や家庭用ロボットなどのセンシティブな応用では、プライバシー保護が極めて重要であり、欧州のGDPR(一般データ保護規則)など厳格な地域規制を遵守しなければなりません。中央集権的なインフラは、安全かつプライバシー保護されたAI協調をサポートするのが困難であり、データ共有を制限し、規制された分野やセンシティブな分野でのイノベーションを抑制しています。
-
スケーラビリティと相互運用性
ロボットシステムは、リソース共有、協調学習、複数のプラットフォームや形態を横断した統合において重大な課題に直面しています。これらの制限はネットワーク効果の分断をもたらし、異なるロボットタイプ間での能力の迅速な移転を妨げています。
2.2 AIロボット x Web3:構造的ソリューションが投資機会を牽引
Web3技術は、分散化、検証可能、プライバシー保護、協調的なロボットネットワークを通じて、上記の課題を根本的に解決します。この融合は新たな投資市場機会を切り開いています:
-
分散型協調開発:インセンティブ駆動型ネットワークを通じて、ロボットはデータを共有し、モデルやインテリジェントエージェントを共同開発できます。
-
検証可能なトレーサビリティと責任:ブロックチェーン技術は、データとモデルの出所、ロボットのアイデンティティや操作履歴の改ざん不可能な記録を保証し、信頼とコンプライアンスに不可欠です。
-
プライバシー保護型協調:先進的な暗号技術により、ロボットは独自またはセンシティブなデータを公開せずに、モデルを共同トレーニングし、知見を共有できます。
-
コミュニティ主導のガバナンス:分散型自律組織(DAOs)は、オンチェーンで透明かつ包括的なルールやポリシーを通じて、ロボットの運用を指導・監督します。
-
クロス形態相互運用性:ブロックチェーンベースのオープンフレームワークは、異なるロボットプラットフォーム間のシームレスな協調を促進し、開発コストを削減し、能力移転を加速します。
-
自律エージェント経済:Web3インフラはロボットに独立した経済エージェントとしてのアイデンティティを与え、人間の介入なしにP2P取引、交渉、トークン化市場への参加を可能にします。
-
分散型物理インフラネットワーク(DePIN):ブロックチェーンベースのP2P計算、センシング、ストレージ、接続リソース共有により、ロボットネットワークのスケーラビリティとレジリエンスを強化します。
以下は、この分野の発展を牽引しているいくつかの革新的プロジェクトです。これらの事例は、AIロボットとWeb3の融合の可能性とトレンドを示しています。もちろん、これは参考情報であり、投資助言ではありません。
分散型データとモデル開発
Web3駆動のプラットフォームは、貢献者が(モーションキャプチャスーツ、センサー共有、ビジョンアップロード、データラベリング、さらには合成データ生成など)に参加することをインセンティブ化することで、データとモデル開発の民主化を実現します。この方法は、より豊かで多様かつ代表的なデータセットとモデルを構築でき、単一企業の能力をはるかに超えます。分散型フレームワークは、境界事例のカバレッジも向上させ、予測不可能な環境で動作するロボットにとって不可欠です。
事例:
-
Frodobots :ロボットゲームを通じて現実世界のデータセットをクラウドソーシングするプロトコル。「Earth Rovers」プロジェクトを展開し、歩道ロボットとグローバルな「Drive to Earn」ゲームを組み合わせ、FrodoBots 2K Dataset(カメラ映像、GPSデータ、音声記録、人間の操作データを含む)を作成。10都市以上をカバーし、累計約2000時間の遠隔ロボット運転データを収集。
-
BitRobot :FrodoBots LabとProtocol Labsが共同開発した暗号インセンティブプラットフォーム。Solanaブロックチェーンとサブネットアーキテクチャを基盤とし、各サブネットが公開チャレンジとして設定され、貢献者はモデルやデータを提出してトークン報酬を獲得、グローバルな協調とオープンソースイノベーションを促進。
-
Reborn Network :AGIロボットオープンエコシステムの基盤レイヤーで、Rebocapモーションキャプチャスーツを提供。誰でも自身の実際の運動データを記録し収益化でき、複雑な人型ロボットデータセットのオープン化を支援。
-
PrismaX :グローバルコミュニティの貢献者の力を活用し、分散型インフラでデータの多様性と真正性を確保。強力な検証とインセンティブメカニズムを実施し、ロボットデータセットの大規模発展を推進。
トレーサビリティと信頼性の証明
ブロックチェーン技術は、ロボットエコシステムにエンドツーエンドの透明性と責任帰属を提供します。データとモデルの検証可能なトレーサビリティ、ロボットのアイデンティティと物理的位置の認証、操作履歴や貢献者参加の明確な記録を保証します。また、協調的検証、オンチェーンレピュテーションシステム、ステークベースの検証メカニズムにより、データとモデルの品質を保証し、低品質または詐欺的な入力によるエコシステムの破壊を防ぎます。
事例:
-
OpenLedger :コミュニティ所有のデータセットで専用モデルをトレーニング・展開するAIブロックチェーンインフラ。「Proof of Attribution」(帰属証明)メカニズムにより、高品質なデータ貢献者に公正な報酬を保証。
トークン化された所有権、ライセンス、マネタイズ
Web3ネイティブの知的財産ツールは、専用データセット、ロボット能力、モデル、インテリジェントエージェントのトークン化ライセンスをサポートします。貢献者はスマートコントラクトでライセンス条項を直接資産に組み込み、データやモデルが再利用または収益化された際に自動的にロイヤリティを受け取れます。この方法は透明で許可不要なアクセスを促進し、ロボットデータとモデルのためのオープンかつ公正な市場を創出します。
事例:
-
Poseidon :IP中心のStoryプロトコルを基盤としたフルスタック分散型データレイヤーで、法的に認可されたAIトレーニングデータを提供。
プライバシー保護ソリューション
病院、ホテルの客室、家庭などで生成される高価値データは、公共チャネルでの取得が困難ですが、その豊富なコンテキスト情報は基盤モデルの性能を大幅に向上させます。暗号化ソリューションにより、プライベートデータをオンチェーン資産に変換し、トレーサブル、組み合わせ可能、マネタイズ可能にしつつプライバシーを保護します。Trusted Execution Environments(TEEs)やZero-Knowledge Proofs(ZKPs)などの技術は、元データを公開せずに安全な計算や結果検証をサポートします。これらのツールにより、組織は分散したセンシティブデータ上でAIモデルをトレーニングしつつ、プライバシーとコンプライアンスを維持できます。
事例:
-
Phala Network :開発者がアプリケーションを安全なTEEにデプロイし、機密AIやデータ処理を実現可能にします。
オープンかつ監査可能なガバナンス
ロボットのトレーニングは通常、透明性や適応性に欠ける独自のブラックボックスシステムに依存しています。透明かつ検証可能なガバナンスは、リスクを低減し、ユーザー、規制当局、企業の信頼を強化する上で不可欠です。Web3技術は、オンチェーンのコミュニティ主導監督を通じて、オープンソースロボットインテリジェンスの協調開発を実現します。
事例:
-
Openmind :オープンなAIネイティブソフトウェアスタックで、ロボットが思考・学習・協調作業できるよう支援。ERC7777標準を提案し、検証可能なルール化ロボットエコシステムの構築を目指し、安全性、透明性、スケーラビリティに注力。この標準は、人間とロボットのアイデンティティ管理、社会的ルールセットの実行、参加者の登録・除外の標準化インターフェースを定義し、関連する権利と責任を明確化。
最後の考察
AIロボットとWeb3技術の融合により、私たちは自律システムが大規模な協調と適応を実現できる全く新しい時代に突入しています。今後3~5年は重要な時期であり、ハードウェアの急速な発展がより強力なAIモデルの誕生を促し、これらのモデルはより豊富な現実世界データセットと分散型協調メカニズムに依拠することになるでしょう。専用AIエージェントは、ホテル業や物流など複数の業界で頭角を現し、巨大な新市場機会を創出すると予想されます。
しかし、このAIロボットと暗号技術の融合は課題ももたらします。バランスの取れた効果的なインセンティブメカニズムの設計は依然として複雑で進化中であり、システムは貢献者に公正な報酬を与えつつ、悪用を防ぐ必要があります。技術的な複雑さも大きな課題であり、複数のロボットタイプのシームレスな統合を実現するために堅牢かつスケーラブルなソリューションの開発が急務です。また、プライバシー保護技術は十分に信頼できるものでなければならず、特にセンシティブデータを扱う際には関係者の信頼を得る必要があります。急速に変化する規制環境にも慎重に対応し、各法域でのコンプライアンスを確保しなければなりません。これらのリスクを解決し、持続可能なリターンを実現することが、技術進歩と広範な応用を推進する鍵となります。
この分野の発展に注目し、協力して進歩を促進し、この急速に拡大する市場で生まれる機会をつかみましょう。
ロボット技術のイノベーションは、共に歩むのが最良の旅です :)
最後に、Chain of Thoughtの「Robotics & The Age of Physical AI」が私の研究に貴重なサポートを提供してくれたことに感謝します。


