作者: merakiki
編譯:深潮TechFlow
幾十年來,機器人技術的應用範圍非常狹窄,主要集中在結構化工廠環境中執行重複性任務。然而,今日的人工智慧(AI)正在徹底改造機器人領域,使機器人能夠理解並執行用戶指令,同時適應動態變化的環境。
我們正邁入一個快速增長的新時代。據花旗銀行預測,到2035年,全球將部署13億台機器人,其應用範圍將從工廠擴展到家庭和服務行業。同時,摩根士丹利(Morgan Stanley)預計,僅人形機器人市場到2050年就可能達到5萬億美元的規模。
儘管這一擴張釋放了巨大的市場潛力,但也伴隨著中心化、信任、隱私和可擴展性等方面的重大挑戰。而Web3技術通過支持去中心化、可驗證、隱私保護和協作的機器人網絡,為解決這些問題提供了變革性的解決方案。
在本期文章中,我們將深入探討不斷演變的AI機器人價值鏈,特別聚焦人形機器人領域,並揭示AI機器人與Web3技術融合所帶來的引人注目的機遇。
AI 機器人價值鏈
AI機器人價值鏈由四個基本層面組成:硬體、智能、數據和代理。每一層都建立在其他層之上,使機器人能夠在複雜的現實環境中感知、推理和行動。
近年來,在Unitree和Figure AI等行業先鋒的引領下,硬體層取得了顯著進展。然而,在非硬體層面仍然存在許多關鍵挑戰,特別是高品質數據集的匱乏、通用基礎模型的缺失、跨設備的兼容性較差以及對可靠邊緣計算的需求。因此,目前最大的發展機遇在於智能層、數據層和代理層。
1.1 硬體層:「身體」
如今,現代「機器人身體」的製造和部署比以往任何時候都更容易。目前市場上已有超過100種不同類型的人形機器人,包括特斯拉的Optimus、Unitree的G1、Agility Robotics的Digit和FigureAI的Figure 02。
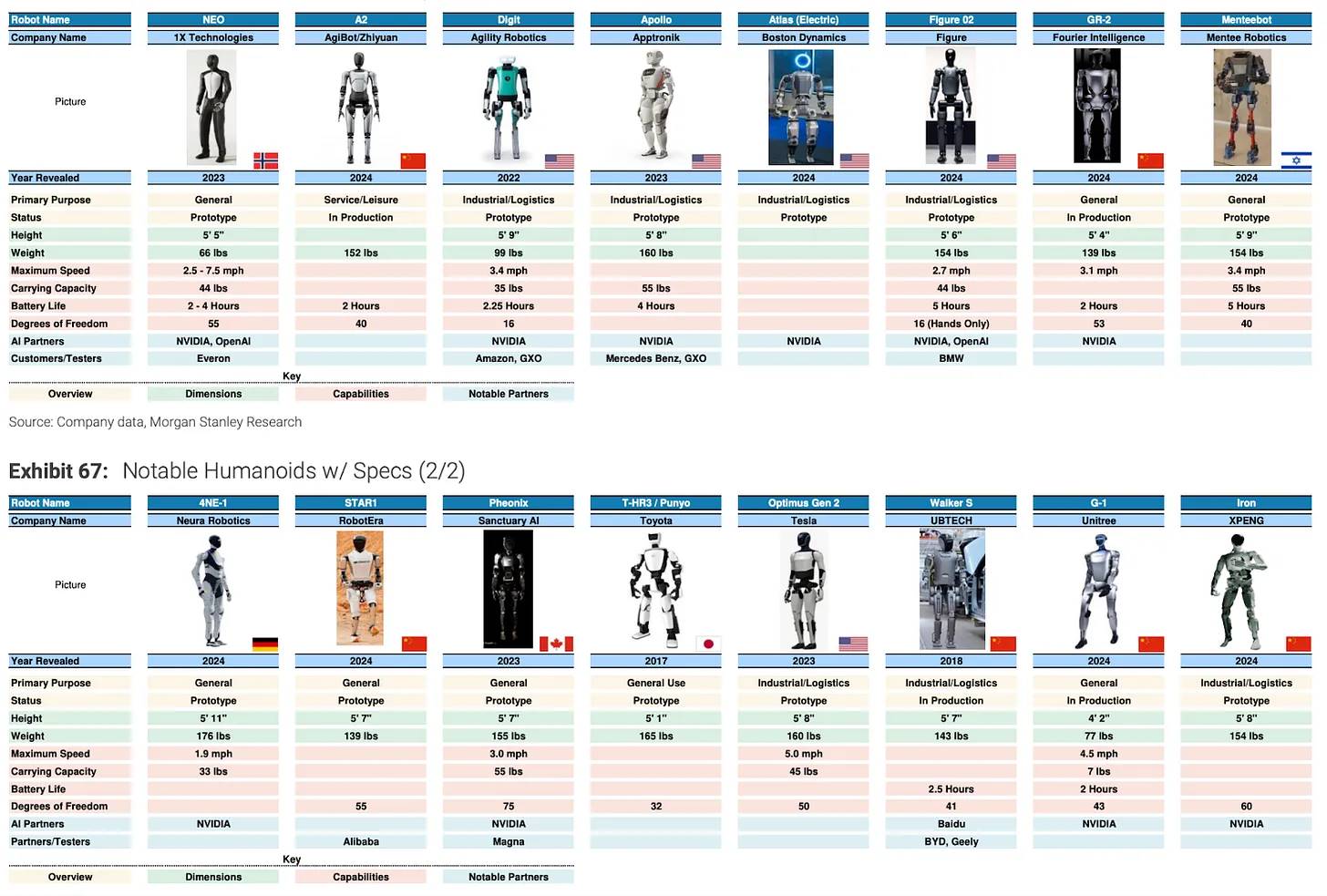
來源:摩根士丹利,《人形機器人100:人形機器人價值鏈地圖》
這一進步得益於以下三大關鍵組件的技術突破:
-
執行器(Actuators):作為機器人的「肌肉」,執行器將數位指令轉化為精確的運動。高性能電機的創新使機器人能夠實現快速且精確的動作,而介電彈性體執行器(Dielectric Elastomer Actuators, DEAs)則適用於精細任務。這些技術顯著提升了機器人的靈活性,例如特斯拉的Optimus Gen 2擁有22個自由度(DoF),以及Unitree的G1,均展現了接近人類的靈活性和令人印象深刻的移動能力。
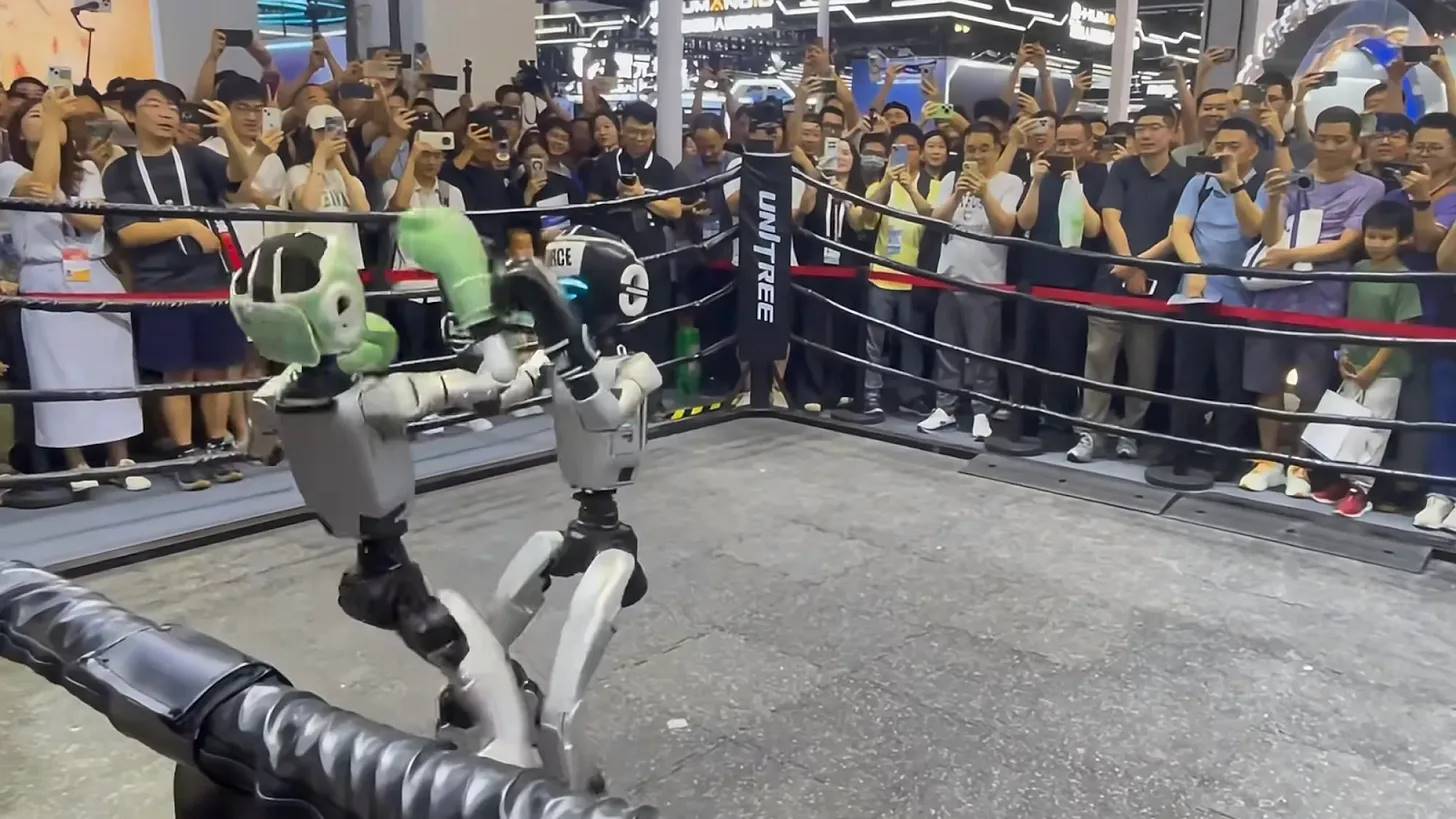
來源:Unitree在2025年WAIC世界人工智慧大會上展示其最新人形機器人進行拳擊比賽
-
感測器(Sensors):先進的感測器通過視覺、LIDAR/RADAR、觸覺和音訊輸入使機器人能夠感知和解讀環境。這些技術支持機器人實現安全導航、精確操作以及情境感知。
-
嵌入式計算(Embedded Computing):設備上的CPU、GPU和AI加速器(如TPU和NPU)能夠即時處理感測器數據並運行AI模型,實現自主決策。可靠的低延遲連接確保了無縫協調,而混合邊緣-雲架構允許機器人在需要時卸載密集型計算任務。
1.2 智能層:「大腦」
隨著硬體的日益成熟,行業的關注點轉向了構建「機器人大腦」:強大的基礎模型和先進的控制策略。
在AI整合之前,機器人依賴基於規則的自動化,執行預編程的動作,缺乏自適應智能。
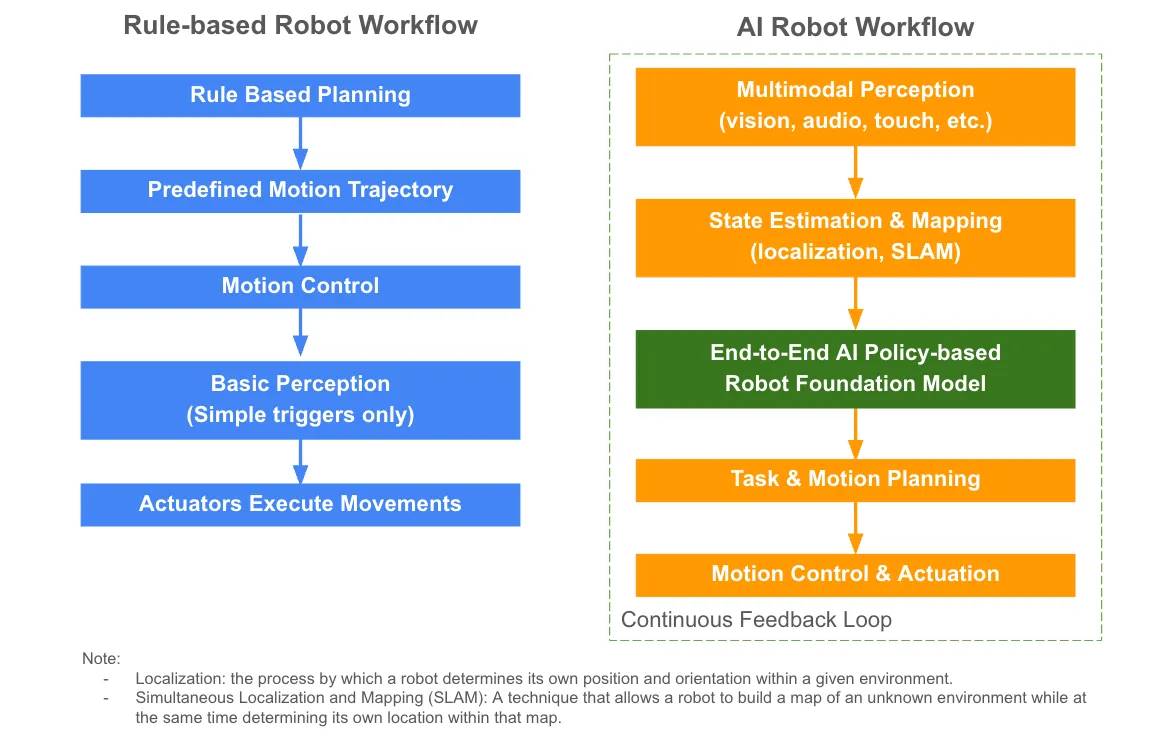
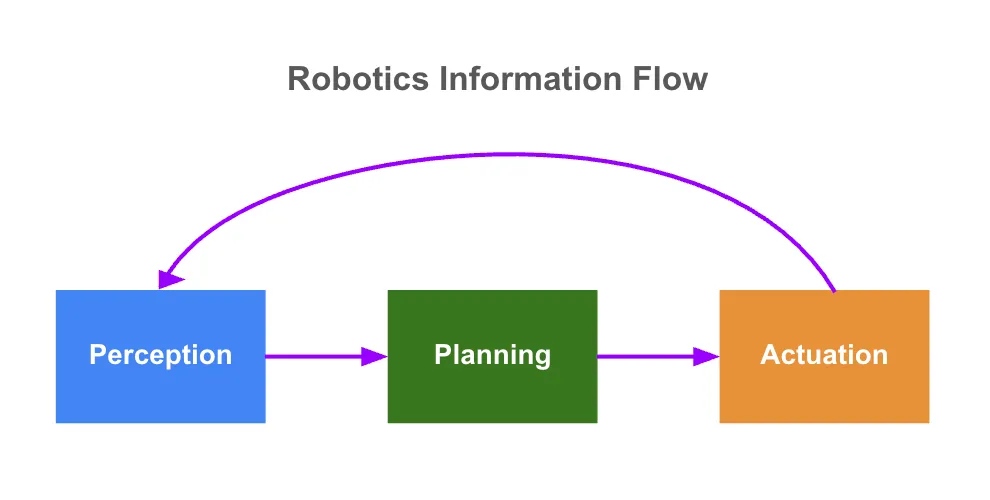
基礎模型正在逐步應用於機器人領域。然而,單靠通用的大型語言模型(LLMs)還遠遠不夠,因為機器人需要在動態的物理環境中進行感知、推理和行動。為滿足這些需求,行業正在開發基於策略的端到端機器人基礎模型。這些模型使機器人能夠:
-
感知(Perceive):接收多模態感測器數據(視覺、音訊、觸覺)
-
規劃(Plan):估算自身狀態、繪製環境地圖並解釋複雜指令,將感知直接映射到行動,減少人工工程干預
-
行動(Act):生成運動計劃並輸出控制命令以實現即時執行
這些模型學習與世界互動的通用「策略」,使機器人能夠適應各種任務,並以更高的智能和自主性運行。高級模型還使用持續反饋,讓機器人從經驗中學習,從而在動態環境中進一步增強適應能力。
VLA模型將感官輸入(主要是視覺數據和自然語言指令)直接映射到機器人行動,使機器人能夠根據「看到」和「聽到」的內容發出適當的控制命令。值得注意的例子包括Google的RT-2、NVIDIA的Isaac GR00T N1,以及Physical Intelligence的π0。
為增強這些模型,通常會整合多種互補方法,例如:
-
世界模型(World Models):構建物理環境的內部模擬,幫助機器人學習複雜行為、預測結果、規劃行動。例如,Google最近推出的Genie 3是一個通用世界模型,可以生成前所未有的多樣化互動環境。
-
深度強化學習(Deep Reinforcement Learning):通過試錯幫助機器人學習行為。
-
遠端操作(Teleoperation):允許遠端控制並提供訓練數據。
-
示範學習(LfD)/模仿學習(Imitation Learning):通過模仿人類動作教授機器人新技能。
下圖展示了這些方法如何在機器人基礎模型中發揮作用。
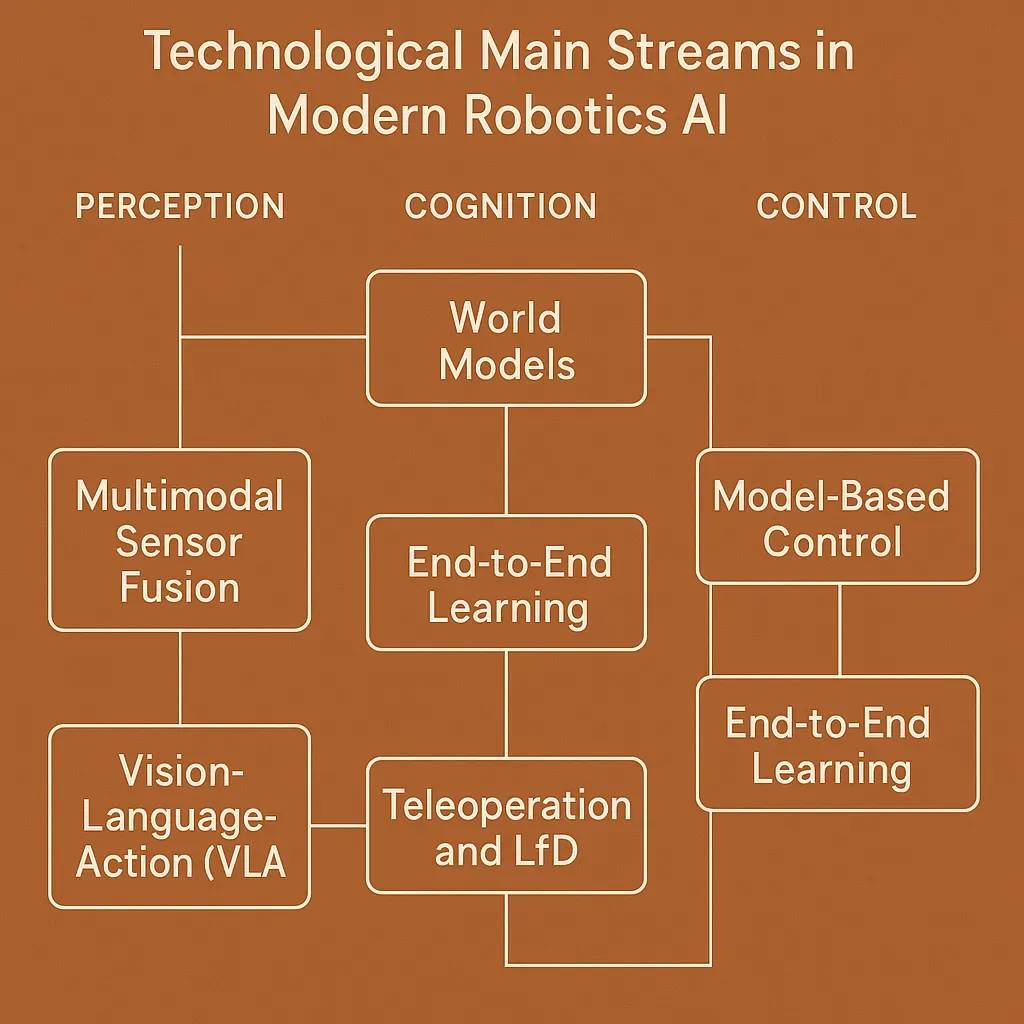
來源:世界模型:推動AGI的物理智能核心(World models: the physical intelligence core driving us toward AGI)
最近的一些開源突破,例如Physical Intelligence的π0和NVIDIA的Isaac GR00T N1,標誌著該領域的重要進展。然而,大多數機器人基礎模型仍然是中心化和閉源的。Covariant、Tesla等公司仍然保留專有代碼和數據集,主要是因為缺乏開放的激勵機制。
這種透明度的缺失限制了機器人平台之間的協作和互操作性,凸顯了對安全透明的模型共享、社群治理的鏈上標準以及跨設備互操作性層的需求。這種方法將促進信任、合作,並推動該領域更強大的發展。
1.3 數據層:大腦的「知識」
強大的機器人數據集依賴於三個支柱:數量、品質和多樣性。
儘管行業在數據積累方面已有所努力,但現有機器人數據集的規模仍遠遠不足。例如,OpenAI的GPT-3是基於3000億個標記訓練的,而最大的開源機器人數據集Open X-Embodiment僅包含超過100萬個真實機器人軌跡,涵蓋22種機器人類型。這與實現強大的泛化能力所需的數據規模相比,差距巨大。
一些專有方法,例如特斯拉通過數據工廠收集數據,讓工作人員穿戴動作捕捉服生成訓練數據,確實能夠幫助收集更多的真實運動數據。然而,這些方法成本高昂,數據多樣性有限,且難以擴展。
為應對這些挑戰,機器人領域正在利用以下三種主要數據來源:
-
互聯網數據:互聯網數據規模龐大且易於擴展,但主要是觀察性數據,缺乏感測器與運動信號。通過在互聯網數據上預訓練大型視覺語言模型(如GPT-4V和Gemini),可以提供有價值的語義和視覺先驗。此外,為影片添加運動學標籤能夠將原始影片轉化為可操作的訓練數據。
-
合成數據:通過模擬生成的合成數據能夠快速進行大規模實驗並涵蓋多樣化場景,但無法完全反映現實世界的複雜性,這一侷限被稱為「模擬到現實差距」(sim-to-real gap)。研究人員通過領域適配(如數據增強、領域隨機化、對抗學習)和模擬到現實遷移來解決這一問題,迭代優化模型並在現實環境中進行測試和微調。
-
真實世界數據:儘管稀缺且昂貴,真實世界數據對於模型的落地和彌合模擬與實際部署之間的差距至關重要。高品質的真實數據通常包括第一視角(egocentric views),記錄機器人在任務中「看到」的內容,以及運動數據,記錄其精確動作。運動數據通常通過人類示範或遠端操作採集,利用虛擬實境(VR)、動作捕捉設備或觸覺教學,確保模型從準確的真實例子中學習。
研究表明 ,將互聯網數據、真實世界數據與合成數據相結合進行機器人訓練,比單獨依賴任一數據源能夠顯著提升訓練效率和模型的魯棒性(深潮注:指系統在出現異常、危險情況下能夠保持健壯和強壯的特性)。
與此同時,雖然增加數據數量有所幫助,但數據的多樣性更為重要,尤其是為了實現對新任務和機器人形態的泛化。要實現這種多樣性,需要開放的數據平台和協作式數據共享,包括創建支持多種機器人形態的跨實例數據集,從而推動更強大的基礎模型發展。
1.4 代理層:「物理AI代理」
向物理AI代理發展的趨勢正在加速,這些自主機器人能夠在現實世界中獨立行動。代理層的進步取決於模型的精細調整、持續學習以及針對每個機器人獨特形態的實際適配。
以下是加速物理AI代理發展的幾個新興機會:
-
持續學習與自適應基礎設施:通過即時反饋循環和部署期間的共享經驗,使機器人能夠持續改進。
-
自主代理經濟:機器人作為獨立經濟體運行——在機器人間市場中交易資源,如計算能力和感測器數據,並通過代幣化服務產生收入。
-
多代理系統:下一代平台和算法使機器人群體能夠協調、協作並優化集體行為。
AI 機器人與 Web3 的融合:釋放巨大市場潛力
隨著AI機器人從研究階段邁向現實世界的實際部署,多個長期存在的瓶頸正在阻礙創新,並限制機器人生態系統的可擴展性、魯棒性和經濟可行性。這些瓶頸包括數據和模型的中心化孤島、信任與溯源的缺失、隱私與合規的限制以及互操作性的不足。
2.1 AI機器人面臨的痛點
-
中心化數據與模型孤島
機器人模型需要龐大且多樣化的數據集。然而,當今的數據和模型開發高度中心化、分散且成本高昂,導致系統割裂,適應性較差。在動態的現實環境中部署的機器人,往往因數據多樣性不足和模型魯棒性有限而表現不佳。
-
信任、溯源與可靠性
缺乏透明且可審計的紀錄(包括數據來源、模型訓練過程和機器人操作歷史)削弱了信任與責任感。這成為用戶、監管機構和企業採用機器人的主要障礙。
-
隱私、安全與合規
在醫療和家庭機器人等敏感應用中,隱私保護至關重要,並且必須遵守嚴格的地區性法規(如歐洲的《通用數據保護條例》(GDPR))。中心化基礎設施在支持安全且隱私保護的AI協作方面存在困難,限制了數據共享,並抑制了在受監管或敏感領域的創新。
-
可擴展性與互操作性
機器人系統在資源共享、協同學習以及跨多種平台和形態的整合方面面臨重大挑戰。這些限制導致網絡效應的分裂,並阻礙了能力在不同機器人類型之間的快速轉移。
2.2 AI機器人 x Web3:結構性解決方案驅動可投資機會
Web3技術通過去中心化、可驗證、隱私保護和協作式的機器人網絡,根本性地解決了上述痛點。這種融合正在開闢新的投資市場機會:
-
去中心化的協作開發:通過激勵驅動的網絡,機器人可以共享數據,共同開發模型和智能代理。
-
可驗證的溯源與責任:區塊鏈技術確保數據和模型的來源、機器人身份及操作歷史的不可竄改紀錄,這對於信任和合規至關重要。
-
隱私保護的協作:先進的密碼學解決方案使機器人能夠在不暴露專有或敏感數據的情況下,共同訓練模型並分享見解。
-
社群驅動的治理:去中心化自治組織(DAOs)通過鏈上透明且包容的規則和政策,指導並監督機器人操作。
-
跨形態互操作性:基於區塊鏈的開放框架促進了不同機器人平台之間的無縫協作,降低開發成本並加速能力轉移。
-
自主代理經濟:Web3基礎設施賦予機器人獨立的經濟代理身份,使其能夠進行點對點交易、協商並參與代幣化市場,無需人工干預。
-
去中心化物理基礎設施網絡(DePIN):基於區塊鏈的點對點計算、感知、儲存和連接資源共享,增強了機器人網絡的可擴展性和彈性。
以下是一些正在推動該領域發展的創新項目,這些案例展示了AI機器人與Web3融合的潛力和趨勢。當然,這僅供參考,並不構成投資建議。
去中心化數據與模型開發
Web3驅動的平台通過激勵貢獻者參與(如動作捕捉服、感測器共享、視覺上傳、數據標註,甚至合成數據生成)來實現數據與模型開發的民主化。這種方法能夠構建更豐富、多樣且具代表性的數據集和模型,遠超單個公司所能實現的範圍。去中心化框架還提高了對邊界案例的覆蓋能力,這對於在不可預測環境中運行的機器人至關重要。
案例:
-
Frodobots:通過機器人遊戲進行現實世界數據集眾包的協議。他們推出了“Earth Rovers”項目——一種人行道機器人及全球“Drive to Earn”遊戲,成功創建了FrodoBots 2K Dataset數據集,包括攝影機畫面、GPS數據、音訊記錄和人類操控數據,覆蓋10多個城市,累計約2000小時的遙控機器人駕駛數據。
-
BitRobot:由FrodoBots Lab和Protocol Labs聯合開發的加密激勵平台,基於Solana區塊鏈及子網架構。每個子網被設定為公開挑戰,貢獻者通過提交模型或數據獲取代幣獎勵,激勵全球協作和開源創新。
-
Reborn Network:AGI機器人開放生態的基礎層,提供Rebocap動作捕捉服,使任何人都能記錄並通過自己的真實運動數據獲利,助力複雜人形機器人數據集的開放化。
-
PrismaX:利用全球社群貢獻者的力量,通過去中心化基礎設施確保數據多樣性和真實性,實施強大的驗證和激勵機制,推動機器人數據集的規模化發展。
溯源與可靠性的證明
區塊鏈技術為機器人生態系統提供端到端的透明性和責任歸屬。它確保數據和模型的可驗證溯源,認證機器人身份和物理位置,並維護操作歷史及貢獻者參與的清晰紀錄。此外,協作式驗證、鏈上聲譽系統及基於權益的驗證機制,保障了數據與模型品質,避免低品質或詐欺性輸入破壞生態系統。
案例:
-
OpenLedger:一個利用社群擁有數據集訓練和部署專用模型的AI區塊鏈基礎設施。其通過“Proof of Attribution”(歸屬證明)機制,確保高品質數據貢獻者獲得公平獎勵
代幣化所有權、許可和貨幣化
Web3原生的知識產權工具支持專用數據集、機器人能力、模型及智能代理的代幣化許可。貢獻者可以使用智能合約將許可條款直接嵌入其資產中,確保在數據或模型被重用或變現時,自動獲得版稅支付。這種方法促進了透明、無需許可的存取,並為機器人數據與模型創建了開放且公平的市場。
案例:
-
Poseidon:基於IP中心的Story協議構建的全棧去中心化數據層,提供法律授權的AI訓練數據。
隱私保護解決方案
醫院、飯店房間或家庭等場景生成的高價值數據,儘管難以通過公共管道獲取,但其豐富的上下文資訊可顯著提升基礎模型的效能。通過加密解決方案將私密數據轉化為鏈上資產,使其可追蹤、可組合且可變現,同時保護隱私。可信執行環境(TEEs)和零知識證明(ZKPs)等技術,支持在不暴露原始數據的情況下進行安全計算與結果驗證。這些工具使組織能夠在分散式敏感數據上訓練AI模型,同時保持隱私與合規性。
案例:
-
Phala Network:允許開發者將應用程式部署到安全的TEE中,用於保密AI和數據處理。
開放與可審計的治理
機器人訓練通常依賴於缺乏透明度和適應性的專有黑盒系統。透明且可驗證的治理對於降低風險並增強用戶、監管機構和企業的信任至關重要。Web3技術通過鏈上社群驅動的監督,實現開放原始碼機器人智能的協作開發。
案例:
-
Openmind:一個開放的AI原生軟體棧,幫助機器人思考、學習並協作工作。他們提出了ERC7777標準,旨在建立一個可驗證的規則化機器人生態系統,專注於安全性、透明性和可擴展性。該標準定義了管理人類與機器人身份、執行社會規則集以及參與者註冊與移除的標準化介面,明確其相關權利和責任。
最後的思考
隨著AI機器人與Web3技術的融合,我們正步入一個自主系統能夠實現大規模協作與適應的全新時代。未來3至5年將是關鍵時期,硬體的快速發展將推動更強大的AI模型的誕生,這些模型將依託更豐富的現實世界數據集和去中心化協作機制。我們預計,專用AI代理將在飯店業、物流等多個行業嶄露頭角,創造巨大的新市場機會。
然而,這種AI機器人與加密技術的融合也帶來了挑戰。設計平衡且有效的激勵機制仍然複雜且在不斷演化,系統需要公平地獎勵貢獻者,同時避免被濫用。技術上的複雜性也是一大難題,亟需開發穩健且可擴展的解決方案,以實現多種機器人類型的無縫整合。此外,隱私保護技術必須足夠可靠,才能贏得利益相關者的信任,尤其是在處理敏感數據時。快速變化的監管環境也要求我們謹慎應對,以確保在不同司法管轄區內的合規性。解決這些風險並實現可持續回報是推動技術進步和廣泛應用的關鍵。
讓我們共同關注這一領域的發展,通過協作推動進步,把握這一快速擴張市場中湧現的機遇。
機器人技術的創新是一段最好攜手同行的旅程 :)
最後,我要感謝Chain of Thought的《機器人技術與物理人工智慧時代》(Robotics & The Age of Physical AI)為我的研究提供了寶貴的支持。